
Technical Takeaways
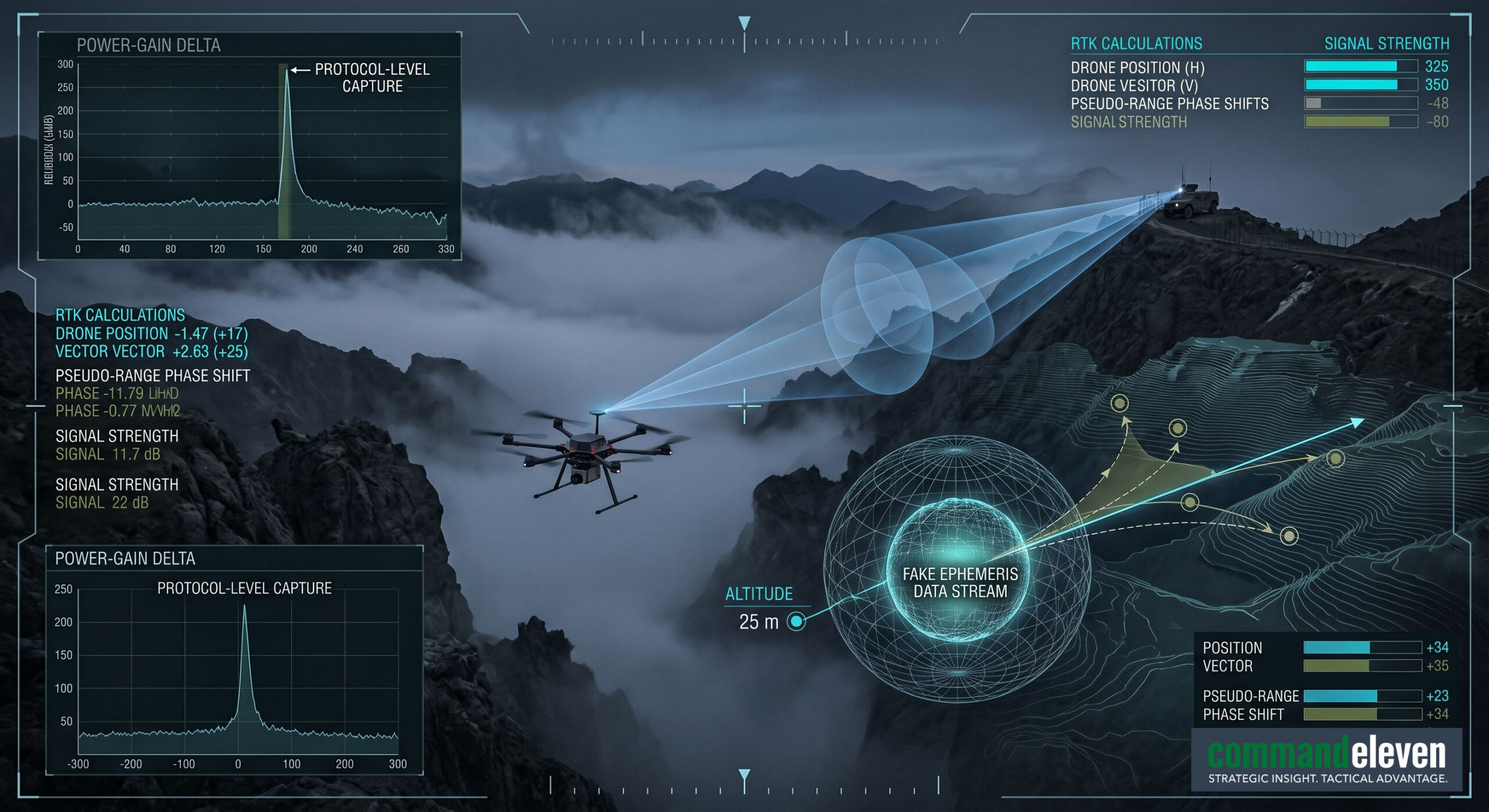
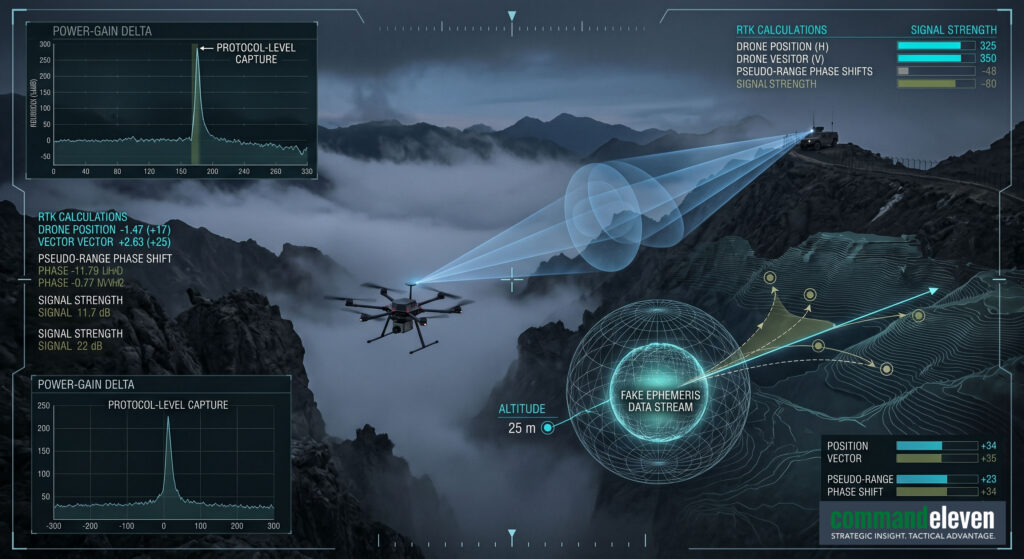
- From Jamming to Protocol-Level Capture: Countering autonomous, waypoint-driven drone infiltration requires a technological shift from legacy brute-force RF jamming to protocol-level GPS spoofing. By executing a controlled power-gain escalation delta, software-defined radio arrays can hijack the target’s navigation loops, manipulating its pseudo-ranges to trigger automated geofence failsafes and force a kinetic capture.
- The Zero-Emission Autonomy Threat: The integration of edge-AI processing chips running Visual Inertial Odometry (VIO) and deep-learning terrain-matching software eliminates a platform’s external data dependencies. This allows next-generation infiltration drones to maintain high-precision low-altitude flight paths while maintaining total radio silence, rendering standard passive RF detection and soft-kill meaconing protocols completely obsolete.
- Administrative Latency as a Vulnerability: The technical efficacy of high-speed counter-UAS hardware is frequently compromised by jurisdictional and data siloing between military air defense networks and civilian domestic security formations. Eliminating this multi-tiered bureaucratic bottleneck requires automated real-time data sanitization pipelines that feed unified target tracks directly to frontline interdiction assets.
Electro-Magnetic Spectrum Inversion: Protocol-Level GPS Spoofing Countermeasures
The deployment of low-altitude uncrewed aerial vehicles (UAVs) by non-state actors and transnational smuggling syndicates along international border corridors has moved past basic radio-frequency (RF) control links. Contemporary hostile infiltration vectors utilize multi-constellation Global Navigation Satellite Systems (GNSS) running concurrent receiver architectures (GPS L1/L2, GLONASS L1, Galileo E1) to execute pre-programmed, autonomous waypoint navigation. Denying this airspace requires a shift from brute-force RF jamming to protocol-level Global Positioning System (GPS) spoofing countermeasures.
Mechanics of Synchronized Forgery and Meaconing
To successfully intercept an autonomous flight control computer,such as the open-source ArduPilot or PX4 autopilot ecosystems integrated into custom carbon-fiber airframes,the spoofing architecture must execute a highly calculated meaconing and signal-injection protocol.
- Acoustic and RF Time-Synchronization: The counter-unmanned aerial system (C-UAS) platform maps the target’s trajectory using high-refresh-rate active electronically scanned array (AESA) X-band radars. Once localized, a software-defined radio (SDR) array (such as the Ettus Research USRP X310) captures the real-time downlinked civilian GNSS signals.
- Power Gain Escalation Protocol: The spoofing transmitter generates a false replica of the satellite constellation’s ephemeris data. The forged signal is initially matched precisely to the legitimate satellite clock phase and power level (typically $-160text{ dBW}$ at sea level). Over an automated execution window lasting between 30 and 45 seconds, the spoofing array escalates its transmitter gain by a factor of +3dB to +6dB. This power delta forces the target’s GNSS receiver tracking loops to lock onto the stronger, forged correlation peaks, decoupling the flight computer from the authentic space-based constellation.
Velocity Vector Diversion and Kinetic Capture Protocols
Once the target’s receiver has been captured, the C-UAS system introduces micro-second time delays into the generated pseudo-ranges, manipulating the drone’s internal position calculations without triggering its autonomous anomaly detection loops.
- Pseudo-Range Manipulation: By incrementally stretching the simulated transit time of specific satellite signals, the spoofer tricks the flight computer into calculating a false altitude or horizontal deviation. To correct for this imagined drift, the drone’s proportional-integral-derivative (PID) flight control loops execute corrective physical maneuvers, altering its actual velocity vector.
- Geofence Exclusion Hijacking: The countermeasure matrix deliberately projects false coordinates that mimic a localized “No-Fly Zone” or geofence boundary embedded within the drone’s firmware. This forced injection triggers the autopilot’s automated failsafe routines, overriding the smuggler’s programmed path and compelling the platform to execute an immediate vertical descent or return-to-launch (RTL) protocol into a pre-designated tactical capture zone.
Mechanical and Kinetic Disruption: Structural Payload Release Mechanics
The payload delivery mechanisms integrated into cross-border infiltration drones have evolved into highly specialized, militarily optimized mechanical assemblies. These systems are engineered to carry dual-use contraband, advanced imagery payloads, or improvised explosive devices (IEDs) across international boundaries while minimizing aerodynamic drag and maximizing deployment reliability.
Hardware Specifications of Release Assemblies
Smuggling syndicates utilize two primary structural methods for payload attachment and remote release, each presenting distinct mechanical tracking signatures:
- Electro-Magnetic Solenoid Shackles: This architecture utilizes a continuous-current 24V electromagnetic solenoid assembly configured to hold a spring-loaded steel locking pin. When the flight computer reaches the destination waypoint coordinates, it shifts a designated pulse-width modulation (PWM) auxiliary channel output. This action drops the voltage across the coil to zero, causing the magnetic field to collapse instantaneously and releasing the cargo loop. This design features a zero-voltage drop safe state, meaning that if the drone loses battery power or undergoes soft-kill jamming, the shackle remains closed, preventing premature payload dropping.
- Micro-Actuator Overcenter Releases: Used for heavier payloads exceeding 10 kilograms, this mechanical design relies on a high-torque, steel-geared digital servo motor linked to an overcenter locking clamp. The geometry of the clamp ensures that the physical weight of the payload is distributed across a rigid aluminum load-bearing plate rather than the servo horn itself. This design prevents mechanical failure or servo burn-out during high-G evasive maneuvers or crosswind corrections along mountain border tracks.
Hardware-Level Tracking Indicators and Forensic Signatures
Analyzing downed or captured border infiltration platforms yields granular forensic data points that identify the origin, technical sophistication, and operational intent of the deploying cell:
- Chassis Composition and 3D-Printer Extrusion Profiles: The structural brackets mounting the release mechanism to the main drone chassis are frequently fabricated using additive manufacturing techniques. Microscopic forensic inspection of the layer adhesion lines, wall thickness, and plastic composition (typically carbon-fiber reinforced nylon or polyethylene terephthalate glycol [PETG]) allows technicians to map the specific extrusion nozzle diameter and thermal profile of the industrial 3D printers used by the manufacturing cell.
- PWM Signal Mapping and Autopilot Logging: Internal flash-based data flash logs extracted from recovered flight computers preserve the exact microsecond timestamps of auxiliary channel activations. Cross-referencing these PWM state changes against the onboard inertial measurement unit (IMU) telemetry reveals the exact airspeed, altitude, and tilt angle of the platform at the precise instant of payload release.
- Shear Pin Volatility Analysis: For specialized military payloads, release mechanisms use precisely calibrated copper or polymer shear pins designed to fracture at specific mechanical load limits. Analyzing the fracture surface via scanning electron microscopy (SEM) indicates whether the payload was released intentionally via electronic command or sheared off during an emergency hard-landing event.
Sensor Fusion Networks: Multi-Layered Border Detection Architecture
The mitigation of cross-border uncrewed aerial vehicle (UAV) incursions requires a continuous, multi-layered sensor fusion network capable of automated target acquisition, tracking, and classification. Because modern low-altitude, small unmanned aircraft systems (sUAS) minimize their physical, electronic, and acoustic signatures, a single detection vector fails to maintain an accurate common operational picture (COP). Modern integrated border management installations exploit data correlation from independent sensors to minimize false-positive rates and automate countermeasure targeting.
Sensor-Level System Specifications and Data Acquisition
- Active Electronically Scanned Array (AESA) X-Band Radars: Serving as the long-range primary detection layer, localized solid-state AESA radars scan specific air vectors with a high update frequency (exceeding 2 Hz). These arrays utilize Doppler processing techniques to isolate the micro-Doppler signatures generated by rotating drone propellers, effectively filtering out environmental clutter such as avian flight patterns or wind-driven foliage.
- Passive Radio-Frequency (RF) Monitoring Arrays: Operating concurrently with radar systems, passive RF direction-finding antenna matrices continuously intercept and analyze airborne electromagnetic emissions. The array calculates the Angle of Arrival (AoA) and Time Difference of Arrival (TDoA) of control uplinks and video downlinks. By cross-referencing intercepted frequencies against a dynamic database of known transmission protocols, the system isolates commercial control signals (e.g., DJI Lightbridge, OcuSync, or open-source ExpressLRS links) even when the drone operates in zero-GPS or low-altitude conditions.
- Co-Located Electro-Optical and Infrared (EO/IR) Tracking Systems: Once radar or RF tracking loops generate an initial target coordinate vector, a high-speed pantilt-zoom (PTZ) EO/IR turret is cued automatically to execute visual verification. The optical system utilizes continuous-zoom thermal imaging sensors to isolate the friction-induced heat signatures of electric motors or internal battery enclosures against cold atmospheric background environments.
The Sensor Fusion and Data Correlation Pipeline
The raw data streams generated by the independent sensor nodes are funneled into a centralized fusion processor running real-time tracking algorithms.
- Spatial and Temporal Alignment: The processing core executes precise coordinate transformations, translating independent radar plots, RF line-of-bearing (LoB) vectors, and optical angular metrics into a unified 3D coordinate space. Temporal alignment algorithms synchronize the data inputs using an internal GPS-disciplined atomic clock reference to compensate for varying sensor latency periods.
- Kinematic State Estimation via Kalman Filtering: The system passes the aligned data points through an extended Kalman filter (EKF) to estimate the exact kinematic state (position, velocity, and acceleration vectors) of the target. If a target is tracked simultaneously by an AESA radar (providing distance and velocity) and an RF array (providing precise angular tracking), the fusion algorithm calculates a composite track profile that is significantly more accurate than the individual sensor outputs.
- AI-Driven Automated Classification and Countermeasure Cueing: The system routes the verified target profile and optical imagery to localized artificial intelligence engines trained on convolutional neural networks (CNNs). The engine automatically classifies the threat class (e.g., fixed-wing, quadcopter, or hexacopter) and assesses the operational risk based on flight trajectory and proximity to critical infrastructure. Once approved by the human-in-the-loop interface, the system directly exports the targeted coordinate tracking data to localized soft-kill (RF/GPS spoofing) or hard-kill (laser-directed energy or net-capture) counter-UAS subsystems.
Operational Threat Analysis: Cross-Border Insertion Profiles and Smuggling Logistics
The operational deployment of infiltration UAVs along international border zones features highly organized, militarily adapted smuggling logistics designed to exploit gaps in conventional border security infrastructure. Analyzing captured flight datasets and recovered platforms reveals a calculated tactical protocol governed by structural payload requirements, terrain conditions, and electronic warfare environments.
Infiltration Profiles and Flight Path Engineering
Hostile drone cells structure their flight plans to minimize the likelihood of sensor detection, adapting their flight parameters based on the operational theater:
- Low-Altitude Terrain-Following Flight Plans: To degrade the effectiveness of ground-based surveillance radars, operators program the flight computer to follow close terrain-following profiles, maintaining an altitude of less than 30 meters above ground level (AGL). By exploiting deep ravines, riverine channels, and natural topographical depressions, the drone positions itself within the radar shadow zones of border monitoring stations.
- Night and Adverse-Weather Sorties: Infiltration missions are systematically executed during low-visibility windows, such as heavy fog, rain, or moonless nights. This operational timing minimizes visual detection by ground patrols and degrades the performance of non-thermal electro-optical tracking cameras.
Platform Optimization and Component Procurement Trends
Forensic evaluations of recovered cross-border drones indicate an operational shift away from off-the-shelf commercial quadcopters toward heavy-lift, highly customized multi-rotor and hybrid fixed-wing platforms fabricated from diverse component supply chains.
| Platform Component | Technical Specifications | Source Infrastructure / Logistics Origin |
| Airframe / Chassis | Customized carbon-fiber composite hexacopters and hybrid VTOL (Vertical Take-Off and Landing) fixed-wing designs. | Mass-produced via commercial manufacturing nodes in East Asia; imported as separate industrial hobbyist parts to avoid international customs flags. |
| Propulsion Systems | High-efficiency brushless DC motors (e.g., T-Motor series) paired with oversized carbon-fiber propeller arrays. | Sourced from international industrial agriculture and commercial mapping supply lines. |
| Flight Control Hardware | Open-source Pixhawk/Cube Orange flight controllers running customized, hardened PX4 or ArduPilot firmware. | Readily accessible commercial components modified internally by localized technical facilitation cells. |
| Navigation Systems | Multi-constellation GNSS receivers integrated with internal micro-electromechanical systems (MEMS) inertial measurement units (IMUs). | Standard commercial navigation tech; customized internally to patch firmware loops against standard RF jamming frequencies. |
Tactical Smuggling Protocols and Ground-Level Coordination
The execution of a cross-border drone insertion is governed by a tightly managed chronological protocol designed to minimize the vulnerability of ground personnel:
- Pre-Flight RF Reconnaissance: Prior to launch, a specialized forward reconnaissance cell deploys handheld spectrum analyzers to scan the border corridor for active electronic warfare signals or temporary jamming vectors. If the spectrum profile is clear, the launch team proceeds to a pre-surveyed, temporary launch site situated within 2 to 5 kilometers of the zero line.
- Autonomous Flight and Zero-Emission Insertion: The drone takes off using automated vertical profiles. Once airborne, the platform maintains total radio silence (zero RF emission), running completely on internal pre-programmed autonomous waypoints. This tactical choice completely neutralizes the effectiveness of conventional passive RF direction-finding sensors.
- Drop-Zone Coordination and Immediate Dispersal: Upon reaching the destination coordinates inside the target territory, the drone executes an automated payload drop via the integrated release mechanisms detailed in Section 2. Ground-level recovery cells, tracking the operation via end-to-end encrypted messaging applications, immediately recover the payload and disperse through localized logistics networks. The drone instantly executes a return-to-launch (RTL) protocol, flying a randomized return path to a different recovery location to prevent security forces from back-tracking the launch coordinates.
Electronic Vulnerabilities: Anti-Spoofing Protections, M-Code Integration, and Firmware Security
As protocol-level Global Positioning System (GPS) spoofing frameworks become more accessible to non-state actors and border smuggling networks, military and state security formations must deploy advanced hardware and software protections to ensure navigation integrity. For defensive platforms,including border-monitoring uncrewed aerial systems (UAS), automated border surveillance towers, and kinetic interceptor units,securing the positioning engine requires moving past civilian signal bands and implementing robust cryptographic and algorithmic defensive loops.
Advanced Hardware Protections: CRPAs and Spatial Null-Steering
To counter multi-directional spoofing attacks designed to inject false spatial coordinates, frontline security assets deploy Controlled Reception Pattern Antennas (CRPAs).
- Multi-Element Array Spatial Null-Steering: A CRPA uses a matrix of independent antenna elements (typically 4-element to 7-element geometries) linked to a high-speed digital signal processor (DSP). When a hostile transmitter attempts to inject a forged GNSS signal, the DSP calculates the Angle of Arrival (AoA) of the phase front. Because authentic satellite signals arrive from widely distributed orbital vectors while a ground-based spoofer transmits from a single localized point, the CRPA identifies the anomalous spatial clustering. The system then automatically alters its internal phase weights, creating a spatial “null” (a directional attenuation zone exceeding -40dB in the direction of the hostile transmitter, effectively blinding the receiver to the forged signal while maintaining tracking locks on legitimate space-based assets.
- Acoustic and Thermal Signature Correlation: CRPAs are increasingly integrated with localized thermal monitoring links that cross-check incoming RF energy spikes against known terrain features, ensuring that any ground-based transmission masquerading as an overhead orbital asset is flagged and suppressed by the receiver architecture.
Cryptographic Signal Authentication: M-Code and Navigation Message Authentication (NMA)
At the protocol level, data-stream security relies on cryptographic encryption and signal authentication routines that prevent software-defined radios from generating believable signal structures.
- Military M-Code Integration: For military-grade security assets, navigation relies on the modernized GPS M-Code signal transmitted on the L1 (1575.42MHz) and L2 (1227.60MHz) frequencies. M-Code utilizes a high-rate, pseudo-random noise (PRN) code encrypted via advanced cryptographic algorithms (such as AES-GCM-256). Because a hostile spoofing node lacks the active cryptographic keys required to generate the encrypted code structure, it cannot forge an M-Code signal. Any attempt to jam the civilian signals simply triggers the receiver to fall back exclusively onto the encrypted M-Code layer, preserving navigation tracking integrity throughout active electronic warfare environments.
- Civilian Signal Hardening via Chimera and NMA: For non-military border-monitoring assets running civilian hardware, protection is achieved through Navigation Message Authentication (NMA) protocols, such as the Galileo E1 Open Service Navigation Message Authentication (OSNMA) and the proposed GPS Chips-Message Robust Authentication (Chimera) framework. These systems embed digital signatures directly within the standard navigation message structure. The receiver verifies these signatures using a public key infrastructure (PKI) system. If a spoofing transmitter tries to modify the ephemeris or satellite clock data to alter the drone’s position, the digital signature check fails, causing the flight computer to immediately reject the data stream before it can manipulate the position calculations.
Firmware Security and Failsafe Autopilot Protocols
If a hostile spoofing attack succeeds in altering the civilian GNSS tracking registers, the platform’s survival depends on firmware-level security controls designed to isolate the positioning anomaly and prevent vehicle capture:
- Sensor Cross-Checking and Inertial Fusion: Hardened autopilot systems run strict consistency checks between the GNSS data stream and independent onboard sensors, specifically micro-electromechanical systems (MEMS) inertial measurement units (IMUs), magnetic compasses, and laser altimeters. If the GNSS data stream shows an instantaneous acceleration or velocity vector that violates the physical laws of inertia or contradicts the IMU’s integrated data registers, the firmware flags a telemetry fault.
- Automated Dead Reckoning Fallback: Upon detecting a positioning anomaly, the autopilot decouples itself from the GNSS data engine entirely. The flight computer shifts into a dead reckoning state, relying exclusively on its internal IMU and optical flow sensors to track its relative movement. The system immediately executes a hardcoded emergency protocol,such as an automated vertical landing or a reverse-trajectory return-to-launch (RTL) maneuver,navigating safely back to its starting base without requiring external satellite positioning.
Hard-Kill Interdiction Technologies: Directed Energy and Net-Capture Kinetics

When soft-kill counter-measures such as RF jamming or GPS spoofing are neutralized by hardened target architectures or completely autonomous, zero-emission flight profiles, border defense protocols dictate the deployment of hard-kill interdiction systems. These hard-kill systems are engineered to physically disrupt, disable, or capture hostile cross-border drones, eliminating the threat of payload delivery or intelligence gathering.
High-Energy Laser (HEL) Weapons Systems
Laser-directed energy weapons provide a low cost-per-shot, deep-magazine capability to engage low-altitude sUAS targets at tactical ranges up to 3 kilometers.
- Laser Generation and System Power Scales: Modern tactical HEL systems utilize solid-state fiber laser arrays operating at power scales ranging from 10 kW to 50 kW. The system combines multiple individual fiber laser modules into a single high-power beam using spectral beam-combining techniques, producing a near-perfect Gaussian beam profile centered on the 1.06-micrometer infrared wavelength.
- Kinetic Destruction Mechanics: Once cued by the automated sensor fusion network, the HEL tracking mount locks its optical fast-steering mirrors onto a critical structural component of the target, such as a carbon-fiber rotor arm, the main battery compartment, or the electro-optical payload housing. The continuous energy density causes rapid thermal ablation, heating the target material past its melting point within a fraction of a second. This rapid heating causes structural failure of the airframe or triggers thermal runaway inside lithium-polymer (LiPo) battery cells, causing catastrophic in-flight destruction.
- Sensor and Optical Blind-Killing: At extended ranges where full structural ablation requires longer dwell times, the HEL system can execute a specialized blind-kill protocol. By targeting the drone’s navigation cameras or optical surveillance sensors, the laser dumps energy directly into the high-sensitivity CMOS or CCD arrays. This energy load instantly causes pixel saturation and permanent thermal melting of the imaging substrate, blinding the drone’s optical processing loops and forcing it to abandon its mission vector.
Kinetic Net-Capture and Interceptor UAS Platforms
For operations over populated border districts or critical facilities where falling debris poses a significant safety risk, security forces deploy dedicated interceptor drones equipped with net-capture systems.
- Pneumatic Net Launching Infrastructure: Interceptor platforms are typically high-velocity, battery-powered quadcopters or hexacopters designed for rapid vertical launch and high-speed interception maneuvers. The platform carries a compact, lightweight pneumatic net launcher charged with high-pressure nitrogen or carbon dioxide cylinders.
- Interception Mechanics and Capture Envelopes: The interceptor drone targets the hostile platform from an optimal vector, usually approaching from a high-side angle to exploit the target’s visual blind spots. When the target enters the capture envelope (typically within a range of 5 to 15 meters), the flight computer triggers the pneumatic release valve, deploying a high-tensile-strength Dyneema or Kevlar mesh net. The net expands rapidly in flight, wrapping around the target’s rotor blades and instantly stopping the brushless DC motors.
- Parachute-Controlled Descent and Forensic Preservation: To prevent uncontrolled kinetic impact with the ground, the net capture assembly is structurally linked to an automated ballistic recovery parachute. Once the net entangles the hostile drone, the parachute deploys automatically, slowing the combined mass of the interceptor assembly and the captured target to a safe terminal velocity (under 3 m/s). This controlled landing safeguards ground personnel and preserves the captured drone’s chassis, flight electronics, and payload release mechanisms.
Threat Landscape Projections: Swarm Tactics, AI-Driven Autonomy, and 5G/6G Command Links
The technological evolution of cross-border drone infiltration indicates a imminent shift from individual, isolated sorties to decentralized, multi-agent operations. As commercial silicon manufacturing and edge-computing artificial intelligence (AI) chips become widely distributed, smuggling cartels and non-state threat networks are adapting these capabilities to bypass current single-target counter-UAS sensor networks and electronic warfare protocols.
Decentralized Swarm Intelligence and Mesh Networking
Future infiltration profiles will leverage localized swarm behavior to overwhelm border defense positions through numbers and distributed coordination.
- Peer-to-Peer (P2P) Ad-Hoc Mesh Protocols: Swarm formations deploy customized ad-hoc mesh networking protocols (utilizing modified 2.4 GHz/5.8 GHz Wi-Fi 6E or ultra-wideband [UWB] transceivers). Instead of relying on a centralized control station, individual drones communicate directly with adjacent nodes, continuously sharing positioning, velocity, and altitude metrics.
- Dynamic Reconfiguration and Attrition Management: If the countermeasure matrix neutralizes specific units within the swarm, the remaining platforms automatically adjust their spatial distribution. The mesh network instantly redistributes the pre-programmed mission waypoints among the surviving airframes, ensuring the payload delivery objective is fulfilled despite taking significant operational losses.
Vision-Based Dead Reckoning and Edge-AI Autonomy
To counter advanced GPS spoofing and broad-spectrum RF jamming, next-generation infiltration drones will achieve complete electronic isolation by removing external data dependencies entirely.
- Optical Flow and Visual Inertial Odometry (VIO): Hardened airframes integrate dual-camera stereoscopic vision systems linked directly to high-efficiency edge-AI processing modules (such as the NVIDIA Jetson Orin Nano or specialized low-power ASICs). By running real-time optical flow and VIO algorithms, the drone calculates its exact 3D velocity vector and relative position solely by tracking the movement of static terrain features beneath the fuselage.
- Deep Learning-Based Terrain Matching: The onboard flight computer cross-references real-time visual data against high-resolution, compressed satellite imagery matrices stored within an internal, encrypted NVMe solid-state drive. This capability allows the platform to maintain precision navigation over hundreds of kilometers with zero reliance on GNSS coordinates or active radio-frequency communications, rendering soft-kill jamming and meaconing arrays completely ineffective.
Next-Generation Cellular Command Links (5G/6G)
For operations requiring continuous, low-latency data links without deploying high-power, easily triangulated analog transmitters, threat networks are shifting toward commercial cellular infrastructure.
- Network Infiltration and Roaming Maneuvers: By integrating low-profile, multi-band 5G/6G NR (New Radio) modem modules into the avionics stack, infiltration drones operate within the standard civil communications envelope. The drone communicates by establishing encrypted data tunnels through commercial cell towers situated along border districts, shifting rapidly between different network providers to avoid detection.
- Beamforming and Low-Intercept Signaling: 5G/6G architectures utilize highly directional massive MIMO (Multiple-Input Multiple-Output) antenna arrays that leverage millimeter-wave (mmWave) frequencies to execute precise beamforming. Because the electromagnetic energy is focused into a narrow, directed data tunnel pointed directly at a specific cellular base station, the transmission lacks the broad omnidirectional footprint that passive RF direction-finding sensors require to calculate lines of bearing. This focused signaling hides the drone’s electronic presence within the massive volume of standard urban cellular traffic.
Cross-Border Regulatory Frameworks, Inter-Agency Coordination, and Jurisdictional Friction
The technical execution of counter-UAS operations along international borders is frequently hindered by non-technical variables, specifically the misalignment of civil-military regulatory frameworks and the structural friction inherent in inter-agency data sharing. Because low-altitude drone incursions seamlessly bridge the operational domains of civilian law enforcement, border customs departments, and federal military forces, the speed and efficacy of the physical or electronic response depend heavily on the underlying administrative protocol.
Jurisdictional Siloing and Operational Gaps
The primary operational impediment in executing rapid hard-kill or soft-kill interdiction is the fragmentation of legal authority over specific airspace zones:
- Civilian vs. Military Airspace Boundaries: In most international border corridors, the airspace extending from the zero line up to a specific depth (typically 5 to 10 kilometers) falls under direct military jurisdiction. However, once an infiltration drone penetrates past this tactical zone, the airspace shifts into civil aviation domains managed by domestic police forces or customs enforcement teams.
- The Chain-of-Command Bottleneck: When an advanced AESA radar node managed by a military tracking station identifies a low-altitude target moving into a civilian zone, the data cannot be streamed automatically to local police units due to strict classification firewalls and disparate communication infrastructures. The manual processing of target data through multi-tiered bureaucratic channels routinely introduces an administrative latency exceeding 7 minutes,a window wider than the typical cross-border flight time of a high-speed smuggling drone.
Interoperability Standards and Joint Command Frameworks
To mitigate these jurisdictional vulnerabilities, modern border security architectures require the institutionalization of standardized, joint command frameworks supported by automated data-cross-leveling systems.
- Automated Real-Time Data Sanitization: Implementing cross-domain software solutions allows for the automated parsing and filtering of classified military sensor feeds. These systems strip out sensitive system performance data while instantly exporting the core kinematic target tracks (latitude, longitude, altitude, velocity vectors) to unclassified networks utilized by civilian law enforcement agencies.
- The Integrated Air Defense (IAD) Border Cell: Establishing a co-located Joint Air Defense Operations Center (JADOC) along high-threat border corridors brings together representatives from the military air force, border customs, civil aviation authorities, and tactical counter-UAS units within a single command facility. This physical consolidation eliminates the multi-tiered relay bottleneck, empowering the joint commander to issue immediate electronic soft-kill or kinetic hard-kill execution orders across multiple agency assets simultaneously.
The Unified Technical Target
The optimization of cross-border drone infiltration mechanics has outpaced legacy, single-sensor defensive frameworks. As target systems integrate multi-constellation GNSS engines, hardened 3D-printed payload release mechanisms, autonomous VIO terrain-following navigation software, and directional 5G/6G command telemetry, defensive frameworks can no longer treat counter-UAS operations as an isolated electronic or kinetic problem.
The definitive requirement for modern border integrity demands a highly responsive, multi-layered sensor fusion core that feeds real-time tracking metrics directly into automated soft-kill meaconing setups, high-energy laser interdiction assets, and pneumatic net-capture arrays. This technical network must be anchored within a unified, inter-agency command structure designed to eliminate data-siloing and optimize response speeds, neutralizing the asymmetric advantages exploited by contemporary low-altitude infiltration networks.
